Hi! I am a PhD student in bioacoustics and swarm robotics. I am part of the Active Sensing Collective Lab at the University of Konstanz and affiliated to the Max Planck Institute of Animal Behavior and the Centre for the Advanced Study of Collective Behaviour.
I study acoustic mediated collective behaviour and acoustic signalling in swarms through robot swarms. I equip and build autonomous and decentralized robot swarms capable of sound source localization and echolocation of external audio cues.
I hold a master’s degree in music and acoustic engineering from Politecnico di Milano.

Projects
Acoustically driven Swarm robotics
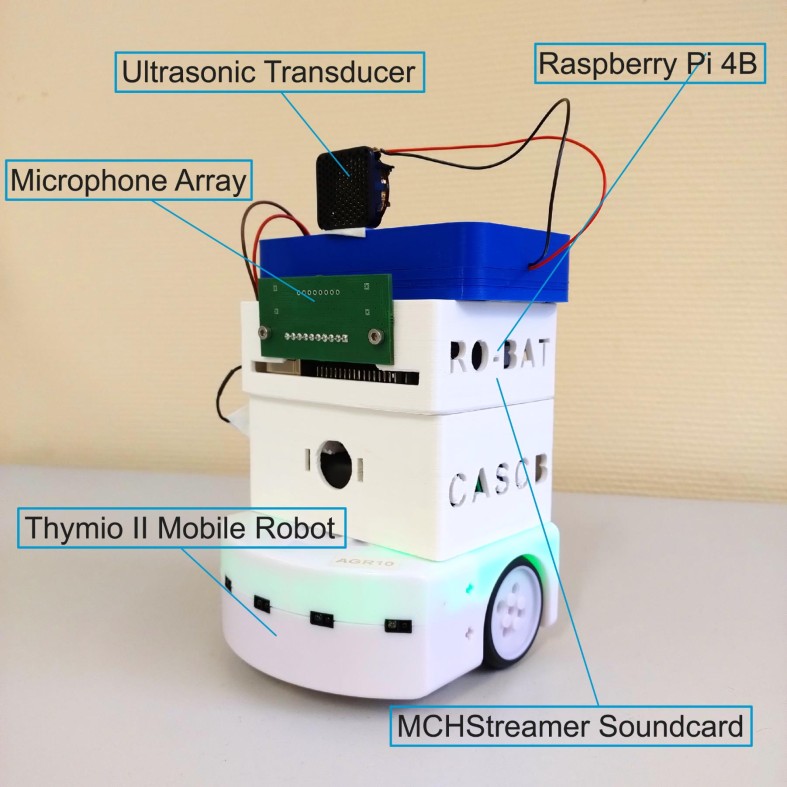
Bats achieve agile flight and coordinated collective motion by relying on echolocation, even within dense swarms where numerous overlapping acoustic signals give rise to the “Cocktail Party Nightmare.” They detect nearby individuals in two ways: actively, by emitting calls and listening for echoes, or passively, by listening to the calls and echoes of their neighbors. Inspired by these remarkable capabilities, I developed RO-BAT and SonoRo—two bio-inspired robotic platforms designed to explore the principles of echolocation and acoustic sensing.
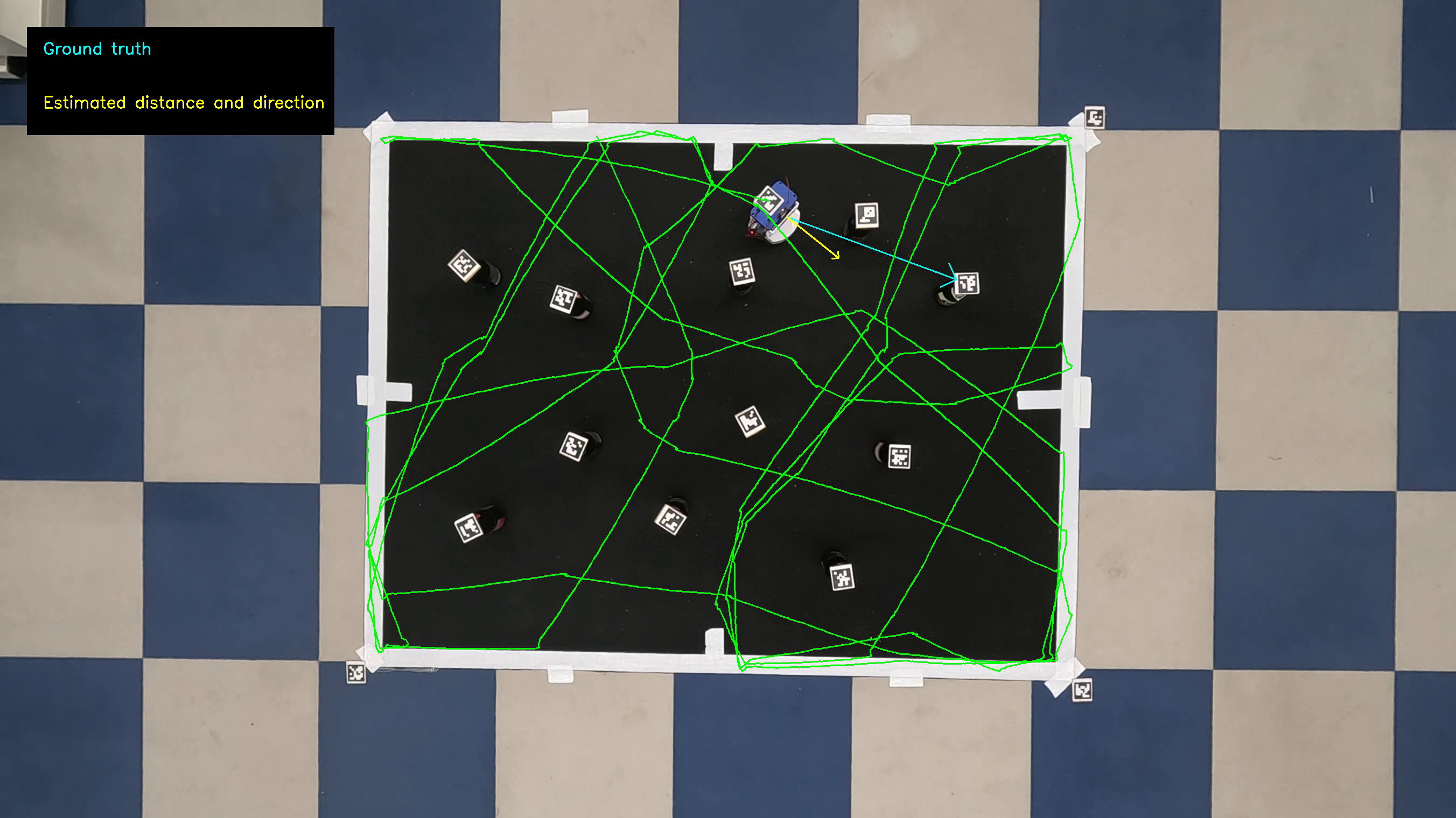
SonoRo is a passive sound-localization platform that listens to external beacons. I equipped it with a microphone array for sound localization and a loudspeaker to broadcast beacon sounds, successfully demonstrating its capabilities across four acoustic navigation scenarios: collision avoidance with static sound sources, goal finding, multi-agent aggregation, and multi-agent dispersion.

Building on this, I implemented active echolocation into the RO-BAT. I developed a signal processing pipeline capable of extracting both range and directional information from returning echoes. In laboratory experiments, RO-BAT autonomously detected and avoided obstacles using only its own acoustic cues, reproducing the core principles of bat echolocation.
My current research focuses on scaling up swarms of autonomous SonoRos and RO-BATs into fully decentralized collectives to enable a wider repertoire of swarm behaviors. As part of an interdisciplinary research program, I pursue parallel investigations into active sensing and novel robotic systems. My goal is to use the strategies bats evolved to handle overlapping signals to build scalable, resource-efficient sensing methods for robotics.
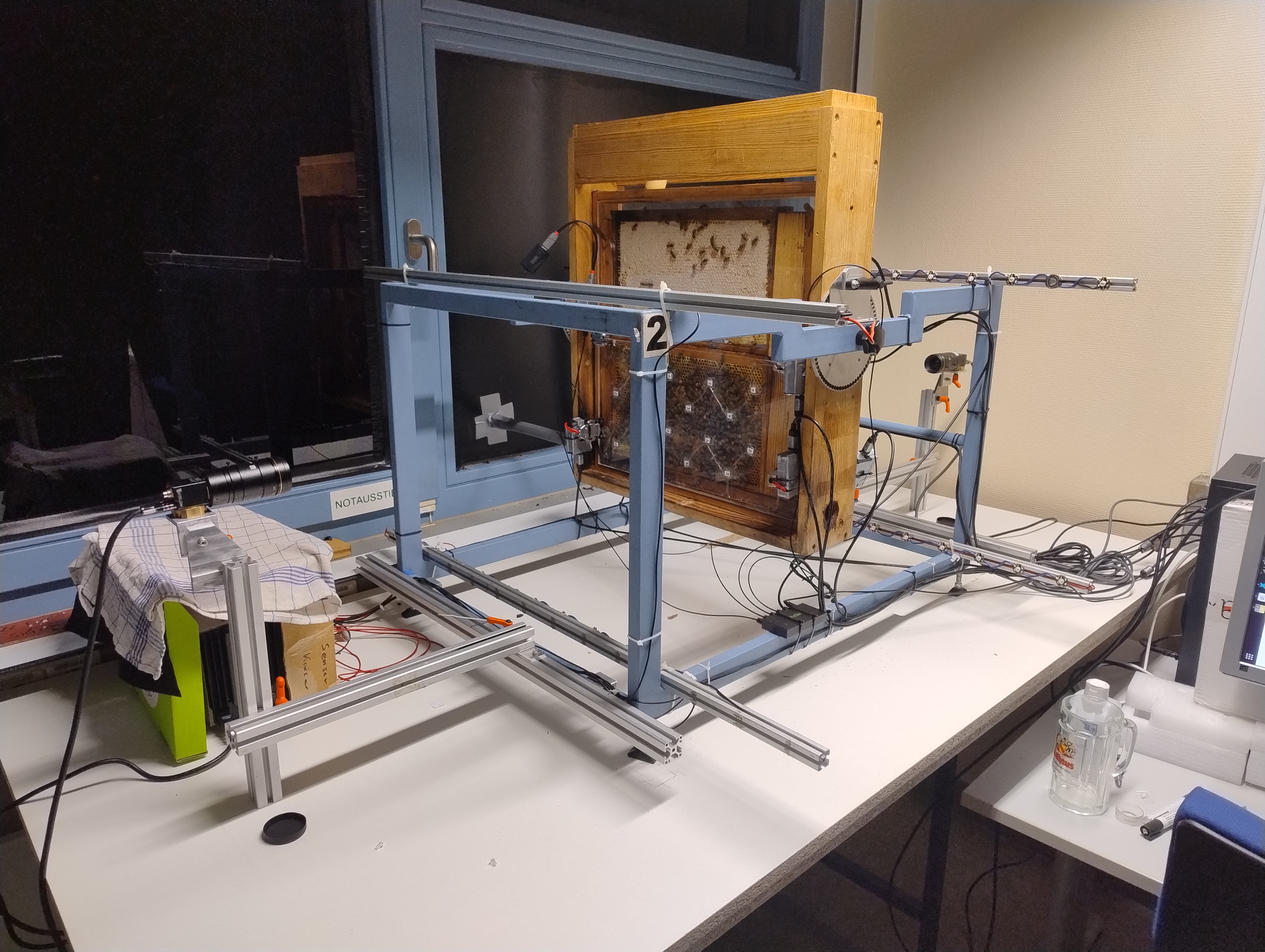
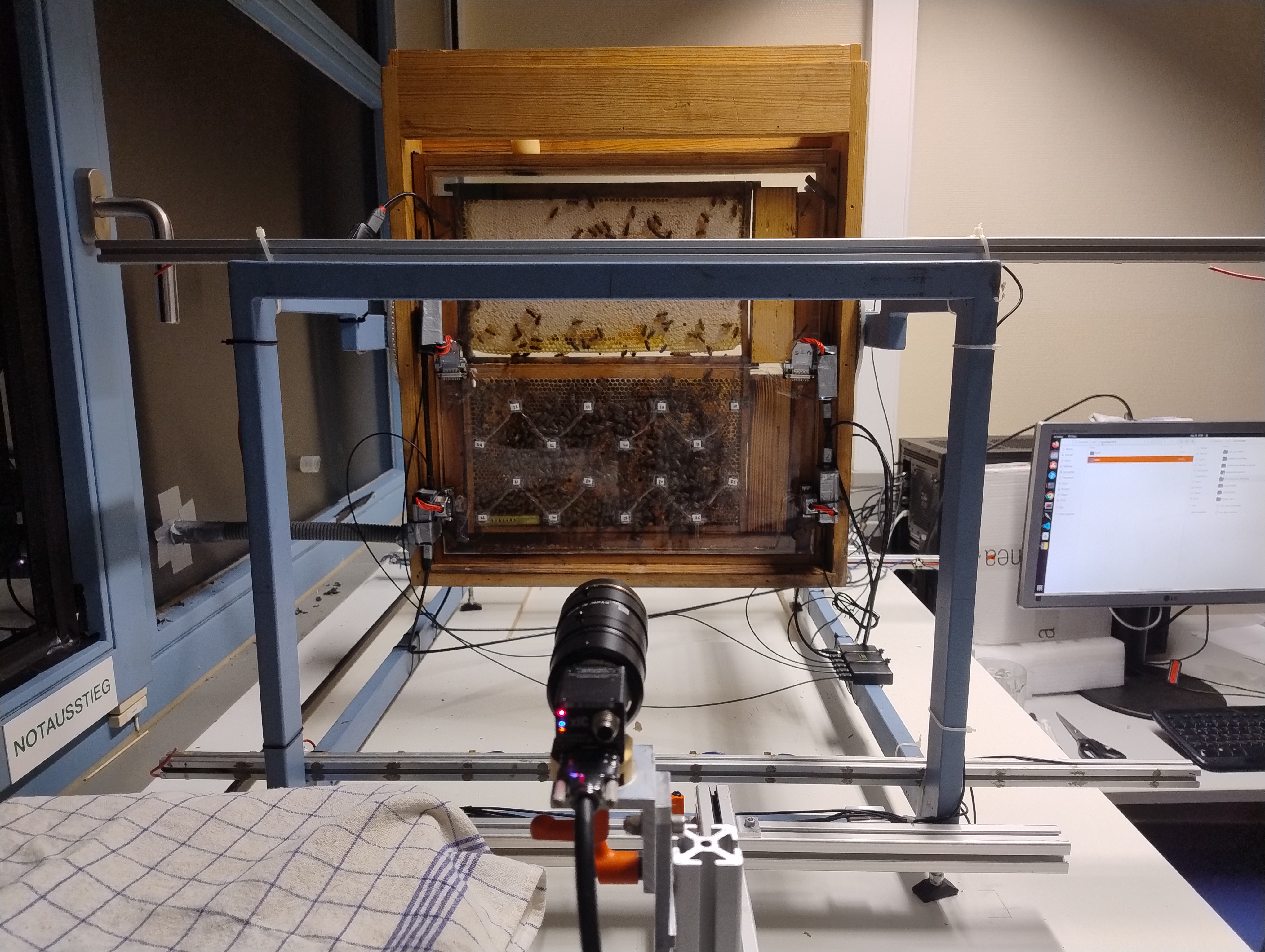
The Sound of the Bees
Bees are social insects that coordinate their colonies through visual, chemical, electrical, and acoustic signals. While the famous “waggle dance” has been heavily studied thanks to visual observation hives, other critical communication methods lack data due to recording limitations. A prime example is the stop signal, which a bee uses to warn a sister bee against promoting a dangerous location. By head-bumping her nestmate, she generates a loud, distinctive vibration. Theory predicts these stop signals act as critical negative feedback to regulate colony behavior, but we still lack a quantitative analysis of how bees actually exploit this mechanism. While bees exchange many other acoustic signals inside the hive, this communication channel has not been extensively studied using spatially distributed microphone arrays and fully autonomous recording setups. To bridge this gap, my project focuses on implementing this exact type of automated recording setup. By capturing these acoustic interactions, I aim to provide the data needed to shed light on how bees use sound to coordinate collective behavior.